
Check this project out here: https://www.pmaverick.com
Tag Archives: WPI
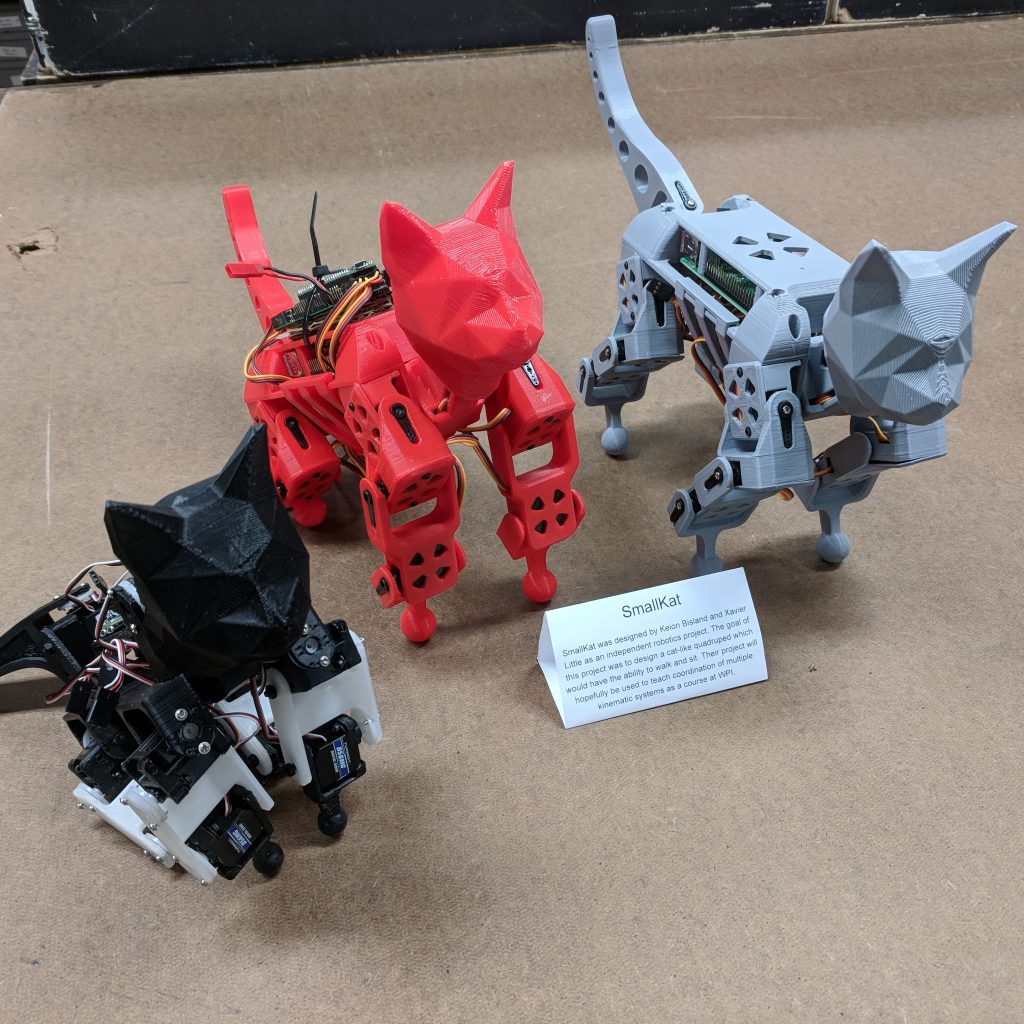
SmallKat MQP
The SmallKat MQP is providing a quadrupedal robotic platform to help research and design new gaits, test sensors, and teach engineering students. Current options limit small companies, universities, and hobbyists due to their complexity, large size, and immense cost. SmallKat is a low-cost robotic platform with customizability and adaptability in mind. To allow for a multitude of gait designs, it is designed with 4-DoF legs controlled by powerful custom servo motors, 9-DoF IMUs, and custom microcontrollers. The body is constructed using additive manufacturing with PLA plastics, and even has a continuum tail for added body control. The higher-level controller runs on a single-board computer for added performance when computing kinematics and dynamics, and controlling different gaits. Future revisions of SmallKat could look to advance the basic gaits that were developed and add new sensors like a 3D camera.
Mechanical Design
4-DoF Legs powered by JX HV-5932MG for adaptability & maneuverability
- Low cost ($30), high torque (32kg-cm stall), & simple communication system
- Other options considered: Dynamixel AX-12a & XH430
Continuum Tail: 20 links, controlled by 4 braided fishing lines
- 4 Maxon motors control the movement of the tail by tightening or loosening the string
- 2 motors control the first half of the tail, other 2 motors control the second half
Polyurethane Feet add an increased coefficient of friction with the ground
- Feet have integrated pressure sensors for force measurements
- 3D printed molds created to attach polyurethane to the feet
Electronics


Custom Microelectronics:
- Motor Controller
- Custom foot sensors
- Charger
- Motherboard
- Tail Driver and Controller
- IMU
Communication Stack
- Receives Updates wirelessly
- Calculates IK of the robot
- Updates joint angles
- Returns joint angles, IMU data, Foot Sensor Data and battery voltage.
Software
Raspberry Pi 3 B+ connected to the microcontroller via HID over USBBowler Studio & Bowler Kernel for development environment & simulationBowler Kernel: underlying kernel, runs headless on the Raspberry Pi 3Forward kinematics & some dynamics are integrated in Bowler Studio
- Developed inverse kinematics software for position control using Geometric approach
Basic Walking Gait with a Central Pattern Generator (CPG) for trajectory generation Dynamic walking gait by calculating the Wide Stability Margin and a CPG for trajectory generation

Want more information? Read our Paper!
Follow Us on Github!

NASA Space Robotics Challenge Team WPI Finalists
What is NASA’s Space Robotics Challenge?
The NASA Space Robotics Challenge was an industry competition that tasked teams with developing and displaying the ability of an R5 robot to assist with the necessary tasks within a NASA mission, such as one on Mars. We used the Robot Operating System (ROS), and the virtual environment Gazebo to simulate the robot performing the tasks. Read more about the challenge here.
How did WPI’s team do?
The WPI Humanoid Robotics Lab team was among 20 finalists in the competition, beating out over 405 teams from 55 countries.

Team WPI Robot in 3 Days 2018
As a part of the WPI Robotics Club, we developed this 2018 FIRST FRC robot in 3 days! This robot is for hundreds of thousands of high school students around the world, who will now have a better understanding of what strategies to use when building their own robot in the next 6 weeks. To read the build blog, please visit here, and make sure to look at our videos below!
Poverty Stoplight Interactive Qualifying Project
This project is an Android application designed to help social workers in Paraguay better help people in poverty. The application was developed for Fundación Paraguay and Poverty Stoplight, and consisted of developing a REST API and an Android application capable of syncing sensitive family data from a secure server.
This project was done as an Inquiry Qualifying Project at Worcester Polytechnic Institute, on a team of 4 students, requiring to solve real societal issues within a multidisciplinary team.
What is Poverty Stoplight?
Poverty stoplight is a multidimensional poverty system that is designed to improve the lives of impoverished families, and eventually get them above the poverty line. The system is currently expanding to several nations, including the United States, Great Britain, and Paraguay. If you would like to read more, please visit www.povertystoplight.org



Project Drogo Wins at HealthHacksRI
We developed a wearable device designed to assist elderly people through post-hip surgery recovery. The device has two main functions:
1. Looking out for prohibited motions
After a hip replacement, there are a number of motions you can’t do. For example, you can’t bend over, you can’t cross your legs, and you can’t shift your weight to that foot. The wearable watches out for all of these things in the background and can alert you (and a caretaker) if they happen in the days after surgery.
2. Guiding the user through rehab
Rehab begins almost immediately after surgery but can be quite expensive and difficult to remember when not under supervision. The app not only makes sure the rehab exercise is completed, but also makes sure the exercise is completed correctly without strain on the new hip.
I specifically worked on the software running on our microcontroller. It sent information to the iPhone over the internet like when a user crossed his legs and when a user correctly did his exercise.
This project was done at HealthHacks RI at the University of Rhode Island with Ben Hylak, Mark Landergan, and Andrew Nagal.




RoboMagellan Team WPI
This robot competed in the RoboMagellan competition at the 2018 RoboGames in California. The robot was designed to autonomously find cones based on approximate GPS coordinates and report them back to a command module.


There were three parts to the robot: the base, the navigation, and the cone finding. For simplicity, the base used was the Dagu Wild Thumper with added encoders on each wheel. A Teensy 3.5 (soon-to-be an ESP-32 Thing from Sparkfun) was used as a controller for the motors and the basic sensors. PID and other control loops were running on this microcontroller. Connected via Serial over USB was an NVidia Jetson TX2, a small but powerful single-board computer. We selected this to run the navigation and cone-finding algorithms. The current robot uses a stereo camera to create a 3D map of its surroundings. It can avoid people and other obstacles while navigating to cones. To find those cones, an artificial intelligence algorithm analyzed incoming pictures and created a waypoint for the robot to go to.
Project Pather
Project Pather is a kiosk mapping software developed to provide directions to Bringham and Women’s Faulkner Hospital visitors. It has contextual search as well as the capability to send users a message containing the directions via text message or by email. The navigation algorithm is configurable between A-star, breadth-first, or depth-first. Project Pather users can also be directed to doctor offices and/or special rooms depending on what they search for. To visit the Github page, please click here. If you would like to try the program, please click here.
