
Check this project out here: https://www.pmaverick.com
Tag Archives: Major Project
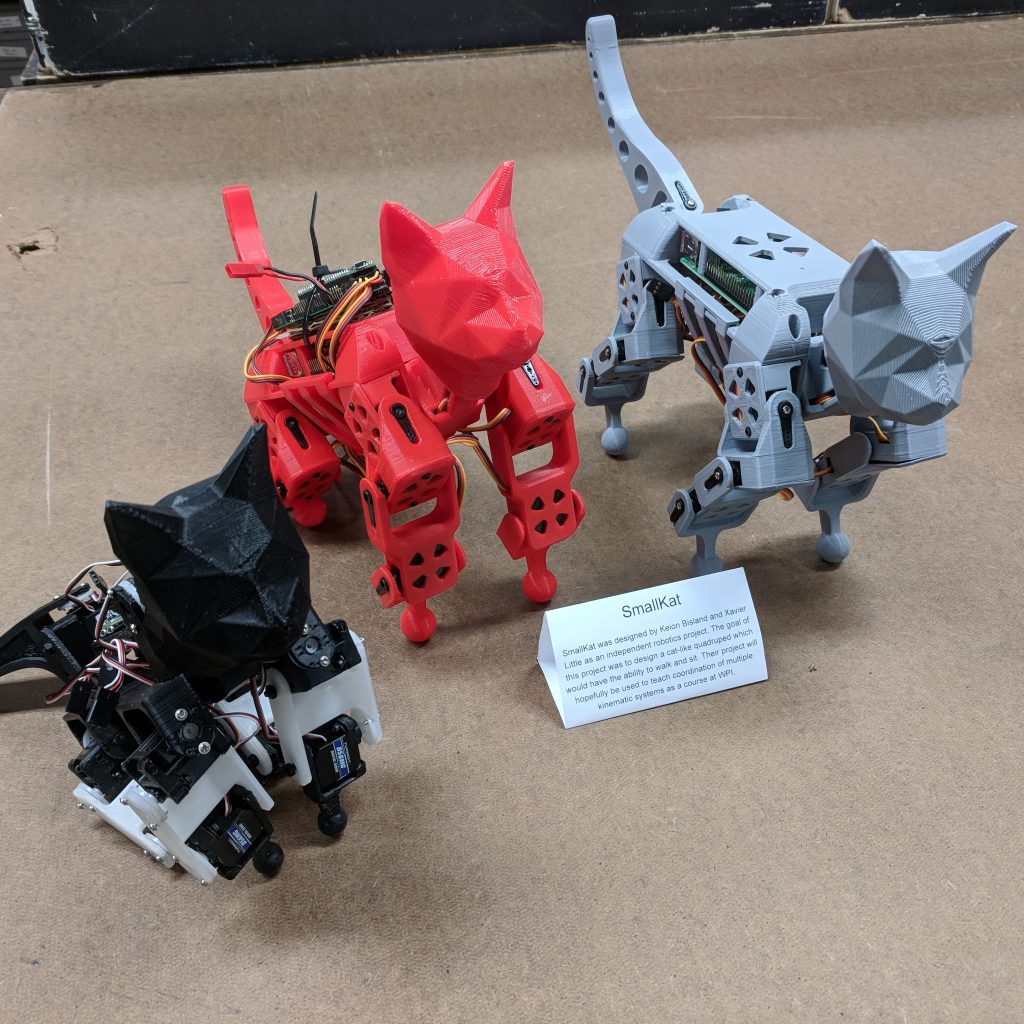
SmallKat MQP
The SmallKat MQP is providing a quadrupedal robotic platform to help research and design new gaits, test sensors, and teach engineering students. Current options limit small companies, universities, and hobbyists due to their complexity, large size, and immense cost. SmallKat is a low-cost robotic platform with customizability and adaptability in mind. To allow for a multitude of gait designs, it is designed with 4-DoF legs controlled by powerful custom servo motors, 9-DoF IMUs, and custom microcontrollers. The body is constructed using additive manufacturing with PLA plastics, and even has a continuum tail for added body control. The higher-level controller runs on a single-board computer for added performance when computing kinematics and dynamics, and controlling different gaits. Future revisions of SmallKat could look to advance the basic gaits that were developed and add new sensors like a 3D camera.
Mechanical Design
4-DoF Legs powered by JX HV-5932MG for adaptability & maneuverability
- Low cost ($30), high torque (32kg-cm stall), & simple communication system
- Other options considered: Dynamixel AX-12a & XH430
Continuum Tail: 20 links, controlled by 4 braided fishing lines
- 4 Maxon motors control the movement of the tail by tightening or loosening the string
- 2 motors control the first half of the tail, other 2 motors control the second half
Polyurethane Feet add an increased coefficient of friction with the ground
- Feet have integrated pressure sensors for force measurements
- 3D printed molds created to attach polyurethane to the feet
Electronics


Custom Microelectronics:
- Motor Controller
- Custom foot sensors
- Charger
- Motherboard
- Tail Driver and Controller
- IMU
Communication Stack
- Receives Updates wirelessly
- Calculates IK of the robot
- Updates joint angles
- Returns joint angles, IMU data, Foot Sensor Data and battery voltage.
Software
Raspberry Pi 3 B+ connected to the microcontroller via HID over USBBowler Studio & Bowler Kernel for development environment & simulationBowler Kernel: underlying kernel, runs headless on the Raspberry Pi 3Forward kinematics & some dynamics are integrated in Bowler Studio
- Developed inverse kinematics software for position control using Geometric approach
Basic Walking Gait with a Central Pattern Generator (CPG) for trajectory generation Dynamic walking gait by calculating the Wide Stability Margin and a CPG for trajectory generation

Want more information? Read our Paper!
Follow Us on Github!

NASA Space Robotics Challenge Team WPI Finalists
What is NASA’s Space Robotics Challenge?
The NASA Space Robotics Challenge was an industry competition that tasked teams with developing and displaying the ability of an R5 robot to assist with the necessary tasks within a NASA mission, such as one on Mars. We used the Robot Operating System (ROS), and the virtual environment Gazebo to simulate the robot performing the tasks. Read more about the challenge here.
How did WPI’s team do?
The WPI Humanoid Robotics Lab team was among 20 finalists in the competition, beating out over 405 teams from 55 countries.