In recognition of my performance at the 2016 Intel International Science and Engineering Fair, MIT Lincoln Laboratory named a newly discovered asteroid in my honor. Welcome to existence, Minor Planet 33662 Tacescu! Read more about it here: https://ssd.jpl.nasa.gov/sbdb.cgi?sstr=33662;old=0;orb=1;cov=0;log=0;cad=0#orb
This robot competed in the RoboMagellan competition at the 2018 RoboGames in California. The robot was designed to autonomously find cones based on approximate GPS coordinates and report them back to a command module.
There were three parts to the robot: the base, the navigation, and the cone finding. For simplicity, the base used was the Dagu Wild Thumper with added encoders on each wheel. A Teensy 3.5 (soon-to-be an ESP-32 Thing from Sparkfun) was used as a controller for the motors and the basic sensors. PID and other control loops were running on this microcontroller. Connected via Serial over USB was an NVidia Jetson TX2, a small but powerful single-board computer. We selected this to run the navigation and cone-finding algorithms. The current robot uses a stereo camera to create a 3D map of its surroundings. It can avoid people and other obstacles while navigating to cones. To find those cones, an artificial intelligence algorithm analyzed incoming pictures and created a waypoint for the robot to go to.
Project Pather is a kiosk mapping software developed to provide directions to Bringham and Women’s Faulkner Hospital visitors. It has contextual search as well as the capability to send users a message containing the directions via text message or by email. The navigation algorithm is configurable between A-star, breadth-first, or depth-first. Project Pather users can also be directed to doctor offices and/or special rooms depending on what they search for. To visit the Github page, please click here. If you would like to try the program, please click here.
Alongside Project Maverick, I became a 2016 Google Science Fair Regional Finalist, one of 100 in the entire world! See the project posting here: pmaverick.com
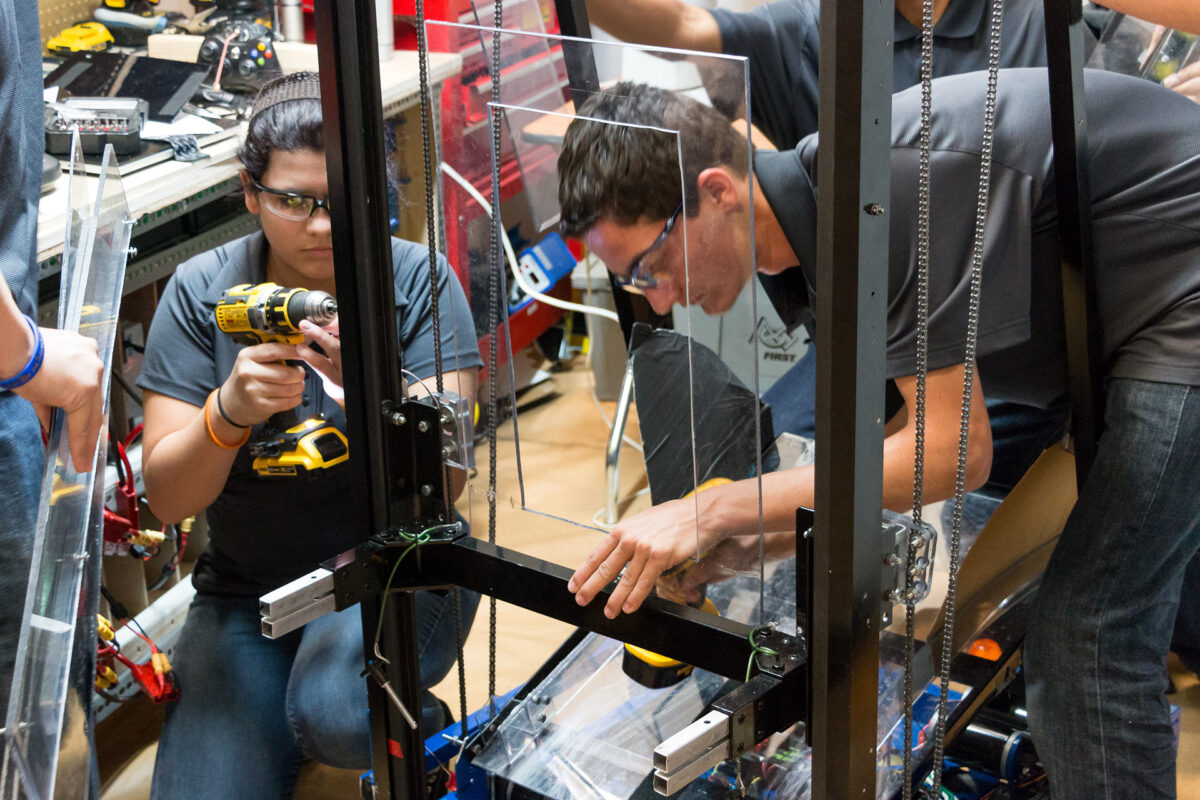
If I were to attribute my success as an engineer to one experience, it would have to be with my FIRST FRC team (Team 2761). Over the 4 years I was with this team, I designed and built 5 different robots and won several awards! The learning experience, however, was by far the most valuable. Three men – Mr. Mendez, Mr. Lim, and my father – sat down with me as a freshman in high school and taught me everything there is to know about mechanical engineering and CAD. From gearbox physics to the transfer of electrical to mechanical energy, these lessons and experiences are some of my most treasured memories. Sadly the team has since disbanded, so here are the robots we built over the course of my 4 years as a student!
2016 StrongHold
This robot was designed for the 2016 FRC StrongHold competition. It was my best design and was fairly successful during the competition. At the end of the season, our team won the coveted Chairman’s Award at the Orange County Regional!
2015 Recycle Rush
This robot won our only regional in our history, taking 1st place at the Ventura Regional! It spans 6ft tall and was powered by a differential drive system. It competed as a part of the 2015 FIRST FRC Recycle Rush competition
2014 Aerial Assist
This was our most competitive robot, receiving 4th at the Sacramento Regional. It had a differential drive system with a cam actuated radial release mechanism to throw a large yoga ball over 20 feet! It competed as a part of the 2014 FIRC Aerial Assist competition
2013 Ultimate Ascent
As my first real robot I’ve ever designed, this one holds a special place in my heart. It has a frame made out of 8020 Aluminum extrusion with 4 omni-directional wheel modules, giving this robot the capability of moving in any direction on a 2d plane! Although this robot didn’t win any awards, it is my favorite over the years. It competed as a part of the 2013 FRC Ultimate Ascent challenge
2761 T-Shirt Cannon
This robot was designed to spread the excitement of robotics throughout the central valley. It reuses the 2014 drive system, with 2 scuba tanks for holding pressurization.
Placed 2nd place in the category of Engineering Mechanics at the Intel International Science and Engineering Fair alongside Project Maverick. In throughout ISEF 2016, I also received:
If you saw me at the 2016 Intel International Science Fair competition and wanted to find my presentation poster, or if you are just interested in my presentation, you can find my poster here!
Received Best in Show award from the International Council of System Engineers (INCOSE) at the Intel International Science and Engineering Fair in 2016 for Project Maverick